2017
National Geographic Magazine
Unlocking the Secrets Behind the Hummingbird’s Frenzy
I'm a Mechanical Design Engineer on the Haptics team at Apple. This page highlights some of my work as a PhD Student in the Mechanical Engineering department at Stanford University.
I was born and raised in Santa Barbara, California. I graduated from Georgia Tech in May 2012 with a bachelor’s degree in Mechanical Engineering. I spent my junior year studying at Georgia Tech’s Lorraine campus in Metz, France. In 2018, I completed my doctorate in the Mechanical Engineering department at Stanford University. My focus was on trying to understand the aerodynamic forces generated by freely hovering hummingbirds and bats. The project has the potential to make animal research less invasive, increase our understandings of extreme muscle functions, and improve the design of bird inspired flying robots.
Download My resume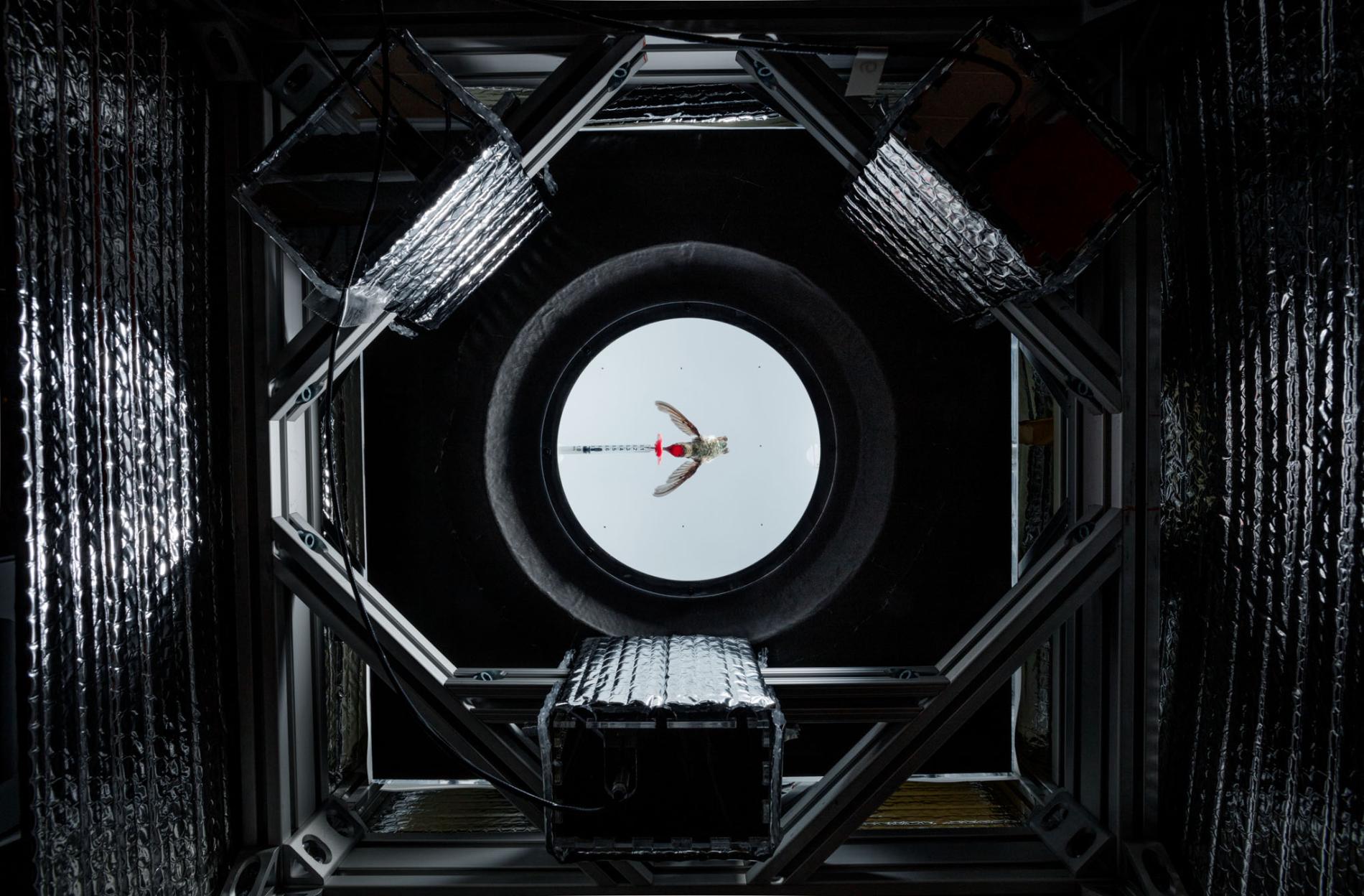
Science Advances 2018
Hummingbirds and nectar bats are the only vertebrates that are specialized for hovering in front of flowers to forage nectar. How their aerodynamic performance compares is, however, unclear. To hover, hummingbirds consistently generate about a quarter of the vertical aerodynamic force required to support their body weight during the upstroke. In contrast, generalist birds in slow hovering flight generate little upstroke weight support. We report that nectar bats also generate elevated weight support during the upstroke compared to generalist bats. Comparing 20 Neotropical species, we show how nectarivorous birds and bats converged on this ability by inverting their respective feathered and membrane wings more than species with other diets. However, while hummingbirds converged on an efficient horizontal wingbeat to mostly generate lift, bats rely on lift and drag during the downstroke to fully support their body weight. Furthermore, whereas the ability of nectar bats to aerodynamically support their body weight during the upstroke is elevated, it is much smaller than that of hummingbirds. Bats compensate by generating more aerodynamic weight support during their extended downstroke. Although, in principle, it requires more aerodynamic power to hover using this method, bats have adapted by evolving much larger wings for their body weight. Therefore, the net aerodynamic induced power required to hover is similar among hummingbirds and bats per unit body mass. This mechanistic insight into how feathered wings and membrane wings ultimately require similar aerodynamic power to hover may inform analogous design trade-offs in aerial robots.
eLife 2021
How hummingbirds hum is not fully understood, but its biophysical origin is encoded in the acoustic nearfield. Hence, we studied six freely hovering Anna’s hummingbirds, performing acoustic nearfield holography using a 2176 microphone array in vivo, while also directly measuring the 3D aerodynamic forces using a new aerodynamic force platform. We corroborate the acoustic measurements by developing an idealized acoustic model that integrates the aerodynamic forces with wing kinematics, which shows how the timbre of the hummingbird’s hum arises from the oscillating lift and drag forces on each wing. Comparing birds and insects, we find that the characteristic humming timbre and radiated power of their flapping wings originates from the higher harmonics in the aerodynamic forces that support their bodyweight. Our model analysis across insects and birds shows that allometric deviation makes larger birds quieter and elongated flies louder, while also clarifying complex bioacoustic behavior.
Journal of Experimental Biology 2018
Both hummingbirds and insects flap their wings to hover. Some insects, like fruit flies, improve efficiency by lifting their body weight equally over the upstroke and downstroke, while utilizing elastic recoil during stroke reversal. It is unclear whether hummingbirds converged on a similar elastic storage solution, because of asymmetries in their lift generation and specialized flight muscle apparatus. The muscles are activated a quarter of a stroke earlier than in larger birds, and contract superfast, which cannot be explained by previous stroke-averaged analyses. We measured the aerodynamic force and kinematics of Anna's hummingbirds to resolve wing torque and power within the wingbeat. Comparing these wingbeat-resolved aerodynamic weight support measurements with those of fruit flies, hawk moths and a generalist bird, the parrotlet, we found that hummingbirds have about the same low induced power losses as the two insects, lower than that of the generalist bird in slow hovering flight. Previous analyses emphasized how bird flight muscles have to overcome wing drag midstroke. We found that high wing inertia revises this for hummingbirds – the pectoralis has to coordinate upstroke to downstroke reversal while the supracoracoideus coordinates downstroke to upstroke reversal. Our mechanistic analysis aligns with all previous muscle recordings and shows how early activation helps furnish elastic recoil through stroke reversal to stay within the physiological limits of muscles. Our findings thus support Weis-Fogh's hypothesis that flies and hummingbirds have converged on a mechanically efficient wingbeat to meet the high energetic demands of hovering flight. These insights can help improve the efficiency of flapping robots.
Bioinspiration & Biomimetics 2017
We describe and explain new advancements in the design of the aerodynamic force platform, a novel instrument that can directly measure the aerodynamic forces generated by freely flying animals and robots. Such in vivo recordings are essential to better understand the precise aerodynamic function of flapping wings in nature, which can critically inform the design of new bioinspired robots. By designing the aerodynamic force platform to be stiff yet lightweight, the natural frequencies of all structural components can be made over five times greater than the frequencies of interest. The associated high-frequency noise can then be filtered out during post-processing to obtain accurate and precise force recordings. We illustrate these abilities by measuring the aerodynamic forces generated by a freely flying bird. The design principles can also be translated to other fluid media. This offers an opportunity to perform high-throughput, real-time, non-intrusive, and in vivo comparative biomechanical measurements of force generation by locomoting animals and robots. These recordings can include complex bimodal terrestrial, aquatic, and aerial behaviors, which will help advance the fields of experimental biology and bioinspired design.
Journal of the royal society, Interface 2015
Flapping wings enable flying animals and biomimetic robots to generate elevated aerodynamic forces. Measurements that demonstrate this capability are based on experiments with tethered robots and animals, and indirect force calculations based on measured kinematics or airflow during free flight. Remarkably, there exists no method to measure these forces directly during free flight. Such in vivo recordings in freely behaving animals are essential to better understand the precise aerodynamic function of their flapping wings, in particular during the downstroke versus upstroke. Here, we demonstrate a new aerodynamic force platform (AFP) for non-intrusive aerodynamic force measurement in freely flying animals and robots. The platform encloses the animal or object that generates fluid force with a physical control surface, which mechanically integrates the net aerodynamic force that is transferred to the earth. Using a straightforward analytical solution of the Navier–Stokes equation, we verified that the method is accurate. We subsequently validated the method with a quadcopter that is suspended in the AFP and generates unsteady thrust profiles. These independent measurements confirm that the AFP is indeed accurate. We demonstrate the effectiveness of the AFP by studying aerodynamic weight support of a freely flying bird in vivo. These measurements confirm earlier findings based on kinematics and flow measurements, which suggest that the avian downstroke, not the upstroke, is primarily responsible for body weight support during take-off and landing.
Check out some media coverage of my research below
Unlocking the Secrets Behind the Hummingbird’s Frenzy
Lens of Time: How Hummingbirds Hover
How hummingbirds hum
Stanford engineers study hovering bats and hummingbirds in Costa Rica
How nectar bats fly nowhere
How hummingbirds hover
Stanford engineers develop a device for measuring how birds take flight
Flight details
Training Birds to Aid a Scientific Breakthrough
Riddle of flying bird’s weight solved by scientists
Unlocking secrets of bird flight to build flying robots
Aerial engineers seek inspiration from slo-mo hummingbirds
Stanford students capture the flight of birds on very high-speed video

Delphi, Greece

Nice, France

Metz, France

Rome, Italy

Normandy, France

Delphi, Greece

Metz, France

Paris, France

Rome, Italy

Strasbourg, France

Paris, France

Vatican City

Vatican City

Venice, Italy

Venice, Italy

Nice, France

Rome, Italy

Prague, Czech Republic